Introduction: The Component That Absorbs Every Shock
Automotive chassis rely on rubber bushings to absorb operational shock and maintain structural alignment. When the bond between the metal and rubber fails, or when surface cracks develop, the vehicle suffers from compromised braking and driving dynamics. UnitX engineered a specialized vision solution to enforce rigorous quality control on these complex composite components, ensuring every shipped part meets strict automotive safety standards.
The Challenge: Complex Structure, Diverse Defects, Difficult Imaging
The component combines metal and rubber, featuring a complex structure, uneven textures, and areas prone to occlusion, making defects diverse and difficult to image. Conventional vision systems struggle to achieve stable detection across the full bushing surface.
Target Defects on Composite Surfaces:
To ensure complete structural and functional integrity, the inspection system must explicitly identify:
- Adhesion: Separation or bonding failure at the metal-rubber interface.
- Indentation: Physical depressions or tooling marks on the component exterior.
- Cracks: Surface fractures within the rubber that weaken vibration isolation.
- Missing Sequence & Foreign Objects: Process omissions and debris obstructing the internal cavities.


Rubber bushing: the metal-rubber composite structure and uneven surface texture require vertical-view imaging and automatic rotation for complete defect coverage.
The Solution: Complete Auto-Rotation Coverage
To overcome structural blind spots, UnitX engineered a vertical-view inspection station equipped with an automated rotation mechanism. The system executes a seamless mechanical sequence: parts are automatically loaded, rotated into the optimal optical position, and fully imaged. CorteX instantly processes this visual data to evaluate both the rubber surface and metal end face, automatically uploading the final inspection results to the facility’s network without any manual handling.

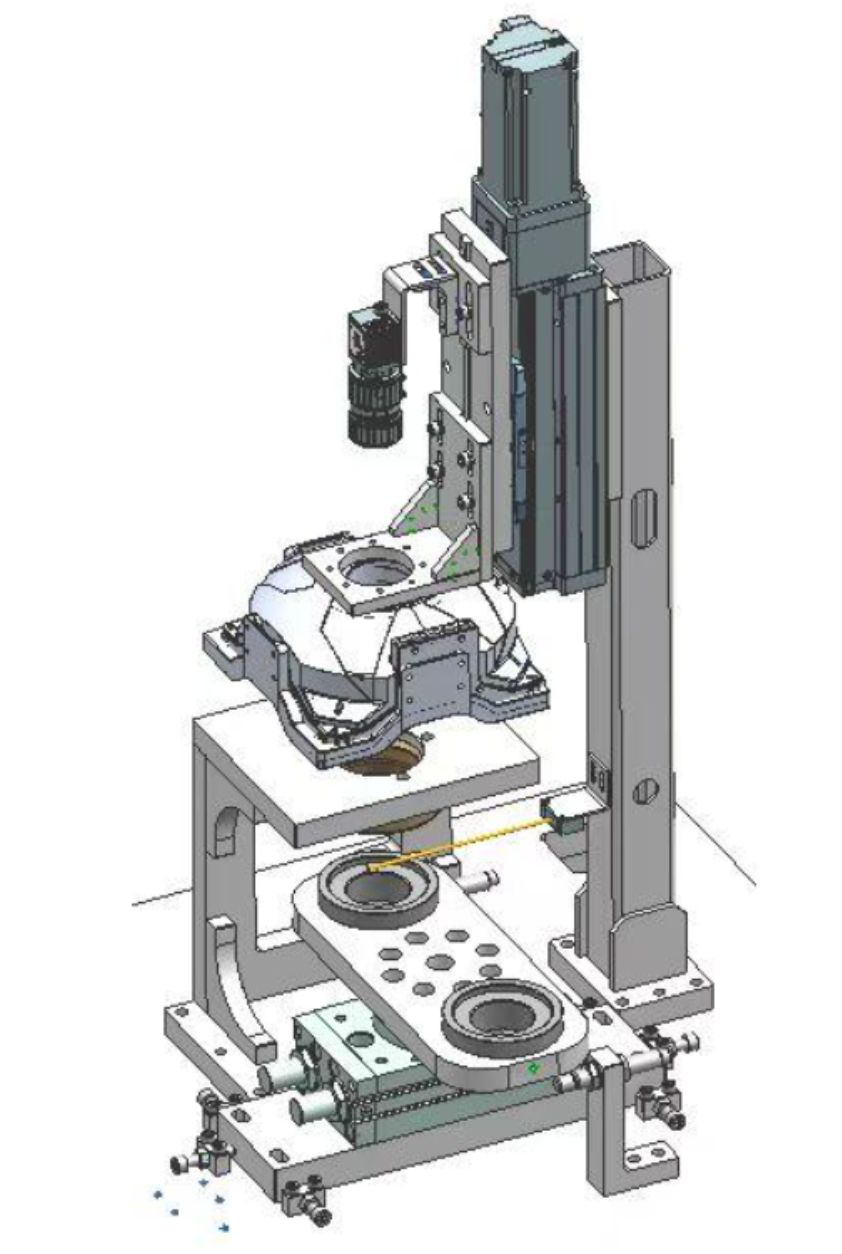
Vertical-view inspection station: automatic loading, rotation, and imaging sequence ensures consistent coverage of rubber surface and metal end face per cycle.
UnitX AI Visual System:
- Imaging System: 1x OptiX unit configured for vertical-view capture.
-
AI Detection System: 1x CorteX unit executing automated defect analysis and data logging.
Results: High-Reliability Detection in 9 Seconds
By automating the rotation and vertical-view imaging, the UnitX system delivered stable detection across the complex metal-rubber surface:
- ≤ 0.1% False Acceptance Rate: Ensures near-zero escapes of critical adhesion failures and surface cracks.
- ≤ 5% False Rejection Rate: Maintains controlled scrap levels despite the unpredictable, uneven rubber textures.
- ≤ 9s Cycle Time: Covers the complete mechanical handling and inspection process per piece.
Defect Visualization
The images below show AI detection results for the three primary defect classes. The AI detects each defect with precise boundary markers, enabling defect classification and location-based process feedback.
- Adhesion: Rubber-metal bonding failure, visible as separation or lifting at the interface.
- Indentation: Surface depression caused by mechanical damage or tooling.
- Cracks: Surface cracks in the rubber layer that propagate under cyclic stress.
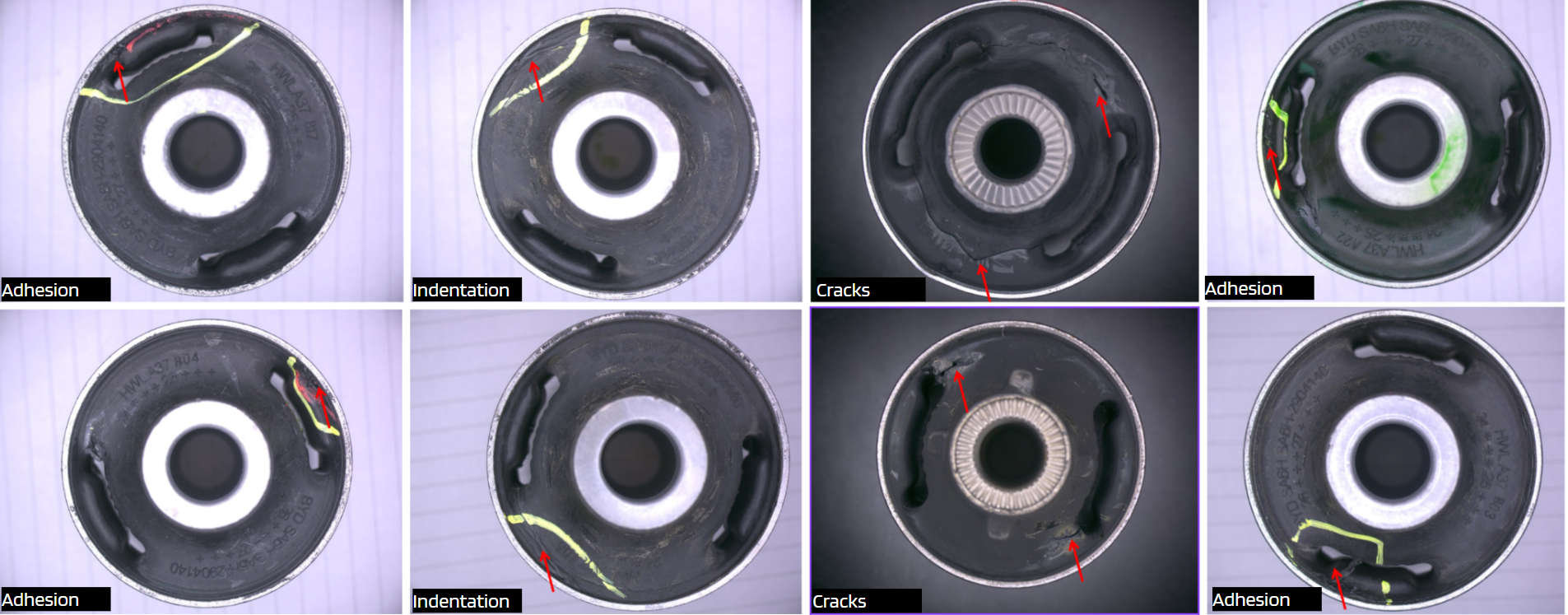
 AI detection results for adhesion, indentation, and cracks, precise boundary annotations logged to the production system for full traceability.
AI detection results for adhesion, indentation, and cracks, precise boundary annotations logged to the production system for full traceability.
Conclusion
Rubber bushing defects are historically difficult to image and easily missed by conventional vision systems. UnitX’s vertical-view, auto-rotation inspection closes this detection gap. By delivering stable, consistent results across complex metal-rubber surfaces in just 9 seconds, the system ensures a near-zero escape rate for critical structural flaws.
Stabilize your bushing quality control.
Contact UnitX to discuss rubber bushing surface inspection.









