Imagine a world where a uav can spot a hidden object in the dark, track a moving car, and even predict sudden changes in weather—all at once. The information fusion machine vision system makes this possible. Each uav in the system works like a superhero with multiple senses. A uav sees through fog, identifies faces in crowds, and navigates complex environments. Multiple uav units share data, making the system smarter. When one uav detects a problem, another uav reacts instantly. The system never sleeps. A uav always watches, always learns. The system adapts fast. One uav can scan crops, while another uav monitors traffic. The system grows stronger as each uav gathers more information. People might think a uav only flies, but in this system, a uav becomes a master of vision. Surprising? Absolutely. No one expects a uav to do so much, yet the system proves it every day.
Key Takeaways
- Information fusion combines data from multiple sensors to help UAVs see clearly in fog, darkness, and crowded places.
- Advanced algorithms improve detection accuracy by reducing false alarms and spotting hidden or moving objects.
- The system adapts quickly to changing environments and learns from new data to stay reliable and robust.
- These machine vision systems support important tasks in healthcare, agriculture, autonomous vehicles, and human activity recognition.
- Future trends like edge computing and swarm intelligence will make UAV detection faster, smarter, and more useful across many fields.
Superhuman Perception
Multi-Sensor Data Fusion
Multi-modal sensor fusion gives a uav the power to see the world in ways that humans cannot. The system combines data from cameras, LiDAR, and radar. This approach creates a dense 3D RGBD model. The system uses information fusion to improve detection. Computer vision algorithms process the raw data from each sensor. The system then merges the results. This method increases the signal-to-noise ratio and reduces false alarms. A uav with sensor fusion can spot small or partially hidden objects. The system detects these objects better than any single-sensor approach.
- The system uses information fusion methods to compare signals from different sensors.
- Sensor fusion allows the use of lower-cost sensors. Upsampling algorithms enhance the data, so the system still achieves high-resolution detection.
- Computer vision in the system can tell the difference between real objects and false positives, like posters.
- The system improves detection in low visibility or when objects are blocked.
When a uav uses multi-modal sensor fusion, it can see through fog, darkness, and even crowded scenes. The system does not get confused by shadows or reflections. Computer vision and information fusion work together to give the uav superhuman perception.
Hidden Details Revealed
A uav with advanced information fusion can reveal details that escape the human eye. The system uses computer vision to analyze every frame. Sensor fusion helps the system find patterns and objects that would otherwise remain hidden. The system detects movement behind obstacles. It can spot changes in the environment before they become problems.
- The system uses information fusion to combine clues from different sensors.
- Computer vision detection methods help the uav identify faces in a crowd or track a moving car.
- The system adapts quickly, learning from new data.
- Information fusion methods make the system more reliable in complex environments.
A uav with this technology does not just see—it understands. The system uses computer vision, sensor fusion, and information fusion to turn raw data into clear, actionable insights. This level of detection changes what is possible for any uav in the field.
Information Fusion Machine Vision System
Enhanced Accuracy
The information fusion machine vision system transforms how a uav performs detection. By combining computer vision, radar, and other sensors, the system achieves higher detection accuracy than traditional approaches. Each sensor captures unique data. The system uses computer vision to process images, radar to measure distance, and sensor fusion to merge these signals. This process allows the system to identify targets with greater precision.
A uav equipped with this technology can detect objects in challenging conditions. For example, the system can spot a moving car in heavy rain or identify a person in a crowded area. Computer vision algorithms analyze every frame, while information fusion methods compare signals from multiple sources. The system reduces false alarms and increases detection accuracy.
Deep learning algorithms play a key role in this process. The system uses advanced algorithm structures to learn from large datasets. These algorithms improve feature extraction, making detection more reliable. The information fusion machine vision system adapts to new environments quickly. It learns from each detection event and updates its models.
The system does not rely on a single sensor. Instead, it uses information fusion to combine the strengths of each sensor. This approach leads to better detection accuracy and more robust performance.
The following list highlights how deep learning and fuzzy integrals improve decision-making and reliability in the information fusion machine vision system:
- Deep learning networks convert probability distributions into uncertain information, helping the system represent ambiguity in target intention recognition.
- The fuzzy discount-weighting operation applies fuzzy discount and weighting rules, generating discount evidence and weighting coefficients.
- The fuzzy discount operation modifies original evidence using external information, improving the quality of input data.
- The fuzzy weighting operation integrates both external and internal information, increasing the reliability of fusion results.
- These mechanisms help the system handle uncertain and incomplete information, leading to more reasonable fusion outcomes.
- Simulation results show that these methods improve global target intention recognition, supporting better decision-making in the information fusion machine vision system.
The system uses computer vision and information fusion to achieve high detection accuracy. Feature extraction and data classification become more effective with these advanced algorithms. The information fusion machine vision system sets a new standard for detection in complex scenarios.
Robustness in Complex Environments
A uav faces many challenges in real-world environments. The information fusion machine vision system provides robustness by using computer vision, sensor fusion, and advanced algorithms. The system adapts to changing light, weather, and obstacles. It maintains high detection accuracy even when conditions change rapidly.
Computer vision algorithms process data from multiple sensors. The system uses information fusion to combine these signals, making detection more reliable. For example, a uav can fly through fog or dust and still perform accurate detection. The system identifies objects that traditional machine learning algorithms might miss.
The information fusion machine vision system uses feature extraction to focus on important details. The algorithm filters out noise and irrelevant data. This process improves detection and reduces errors. The system also uses information fusion methods to resolve conflicts between sensors. When one sensor gives uncertain data, the system relies on others to confirm detection.
The table below compares traditional machine vision systems and information fusion machine vision systems:
| Aspect | Traditional Machine Vision Systems (ML-based) | Information Fusion Machine Vision Systems (DL-based with Sensor Fusion) |
|---|---|---|
| Cost-effectiveness | Runs on standard CPUs; lower hardware and training costs | Requires GPUs and specialized hardware; higher initial investment |
| Training Time | Shorter training times (seconds to minutes) | Longer training times due to complex models and large datasets |
| Dataset Requirements | Performs well with small datasets | Needs large labeled datasets for effective learning |
| Scalability | Limited scalability with increasing data complexity | Highly scalable; performance improves with more data and complexity |
| Model Complexity | Simple models (e.g., decision trees, SVM) | Complex architectures (e.g., CNNs) combined with sensor fusion |
| Adaptability & Accuracy | Suitable for simple tasks; less adaptable to complex scenarios | Better accuracy and adaptability due to sensor fusion and deep learning |
The information fusion machine vision system requires a higher initial investment. However, it offers better scalability and detection accuracy. The system adapts to complex environments and large-scale tasks. Computer vision and sensor fusion work together to improve detection and reliability.
A uav with this system can operate in diverse settings. The algorithm learns from each detection event. Feature extraction and detection methods ensure that the system remains robust. The information fusion machine vision system continues to set new benchmarks for detection and adaptability.
Real-World Impact

Human Activity Recognition
Information fusion machine vision systems have transformed human activity recognition. These systems use computer vision and deep learning to analyze data from multiple sensors. A uav can track people, recognize gestures, and monitor movement patterns. This technology improves detection in crowded or complex environments. The system combines signals from cameras, radar, and other sensors to increase accuracy.
Researchers have measured the benefits of these systems. For example, the WiDet system uses CNN and wavelet features to achieve 95.5% detection accuracy for walking behavior. Deep learning networks improve precision by at least 10% over traditional methods. The system can recognize activities like walking, running, or sitting with high reliability.
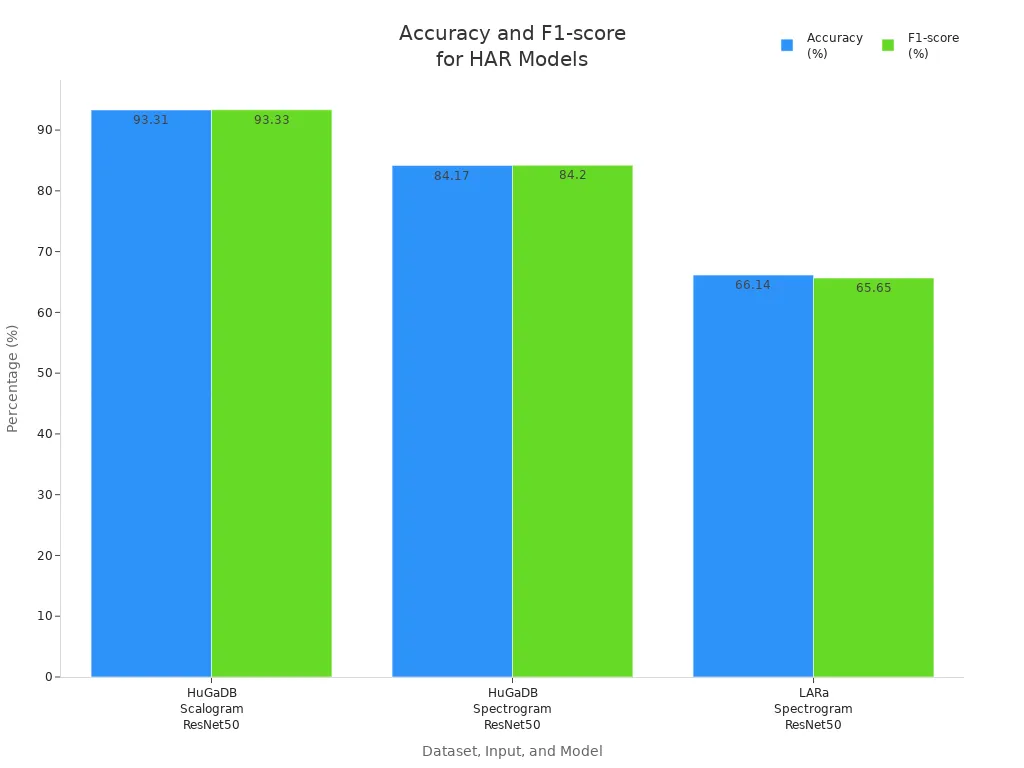
The table below shows how different models and input types perform in human activity recognition:
| Dataset | Input Type | Model | Accuracy (%) | F1-score (%) | Notes |
|---|---|---|---|---|---|
| HuGaDB | Scalogram | ResNet50 | 93.31 | 93.33 | Highest accuracy and F1-score among tested models |
| HuGaDB | Spectrogram | ResNet50 | 84.17 | 84.20 | Lower than scalogram input |
| HuGaDB | Raw 1D | PO-MS-GCN | Slightly lower than 93.31 | 95.2 | Best F1-score but slightly lower accuracy |
| LARa | Spectrogram | ResNet50 | 66.14 | 65.65 | Outperformed scalogram and other models |
| LARa | Scalogram | ResNet50 | ~63.3 | ~62.3 | Lower than spectrogram input |
These results show that information fusion and computer vision make human activity recognition more accurate and robust. A uav can perform uav target detection, uav identification, and even uav tracking in real time.
Autonomous Vehicles
Autonomous vehicles rely on information fusion machine vision systems for safe navigation and detection. The system merges data from cameras, LiDAR, radar, and ultrasonic sensors. This fusion allows the vehicle to detect obstacles, recognize traffic signs, and identify pedestrians. Computer vision algorithms process each sensor’s data to improve detection accuracy.
A uav equipped with this system can perform uav target detection in complex traffic scenarios. The system supports uav identification and helps prevent accidents. Autonomous vehicles use these systems to optimize routes and manage traffic flow. The table below highlights real-world deployments and their impact:
| Industry / Domain | Notable Deployments & Applications | Impact and Outcomes |
|---|---|---|
| Automotive | Autonomous vehicle perception, driver monitoring, traffic management, vehicle inspection | Safer autonomous driving, accident prevention, optimized traffic flow, and efficient vehicle maintenance |
These systems set new standards for detection and reliability in the automotive industry.
Healthcare and Agriculture
Information fusion machine vision systems have made a major impact in healthcare and agriculture. In healthcare, the system uses computer vision and decision fusion to combine data from MRI, CT, PET, and ultrasound. This approach improves detection of diseases like cancer and supports early diagnosis. Automated segmentation and ensemble classifiers help doctors make better decisions. The system reduces misdiagnosis and improves treatment planning.
In agriculture, autonomous robots with machine vision and odometry work longer hours than humans. These robots use the system for uav target detection and uav identification of crops and livestock. They optimize navigation paths, reduce fuel use, and lower labor costs. The system increases yield and saves resources by improving the accuracy of fruit picking and crop monitoring.
Information fusion machine vision systems continue to drive innovation in detection, human activity recognition, and resource management across many industries.
Unique Challenges
Data Overload
Information fusion machine vision systems process massive amounts of data every second. Each uav collects streams from cameras, radar, and other sensors. The system must handle detection tasks for human activity recognition, object tracking, and environmental monitoring. When the data volume grows, the algorithm faces delays. Real-time detection becomes difficult. Limited computing resources on edge devices make the problem worse. Many uav units cannot store or process all the information fusion data at once.
The system also faces challenges with diverse detection objects. Human activity recognition involves many movement types. The algorithm must extract features from complex scenes. High development costs add to the challenge. Vision sensors and software require significant investment. Hardware issues such as lens distortion and sensor noise can reduce detection accuracy. The table below summarizes the main limitations:
| Limitation Area | Description |
|---|---|
| Sensitivity to Ambient Lighting | Variability in light sources affects image quality and detection accuracy, causing possible misjudgments. |
| Hardware Performance Constraints | Issues like lens distortion, sensor noise, limited viewing angles, and installation restrictions degrade image quality. |
| Limited Computing Resources | Complex models require high computing power; edge devices often lack sufficient memory and processing, leading to poor real-time performance. |
| Diversity of Detection Objects | Numerous defect types with unknown generation mechanisms make feature extraction difficult for vision systems. |
| High Development Costs | Significant investment is needed for core components such as vision sensors and underlying software development. |
Researchers explore new algorithm designs to address data overload. AI-driven adaptive matching helps the system align multisensor data. Deep neural networks improve feature extraction for detection and human activity recognition. These advances help the uav process more information fusion data with better accuracy.
Sensor Conflicts
Sensor conflicts occur when one or more uav sensors provide information that disagrees with others. Faulty sensors, data manipulation, or deterioration can cause these conflicts. The system may receive inconsistent or distorted detection results. If left unresolved, these conflicts reduce the reliability of information fusion and human activity recognition.
Traditional uncertainty modeling methods, such as Probability Theory and Fuzzy Set Theory, do not handle high-conflict scenarios well. Dempster-Shafer Theory considers conflict but struggles with large disagreements. Advanced algorithm solutions, like the multilayer attribute-based conflict-reducing observation system and the fuzzified balanced two-layer conflict solving algorithm, detect and reduce the impact of sensor conflicts. These algorithms evaluate the degree of disagreement and devalue conflicting attributes. The system then produces more reliable detection and human activity recognition outcomes.
Shannon’s entropy and distance-based belief function metrics help the system measure conflict and assess data reliability after information fusion.
Promising research directions include robust fusion architectures and collaborative optimization models. These approaches allow the algorithm to integrate features from multiple modalities. The system gains better detection accuracy and more reliable human activity recognition, even in complex environments. The uav continues to improve as researchers develop new information fusion strategies.
Future Possibilities
Emerging Trends
The future of information fusion machine vision systems looks promising. Researchers continue to develop new ways for a uav to improve detection. Many teams now use edge computing to help a uav process detection data faster. This trend allows a uav to make decisions in real time. Another trend involves the use of quantum computing. Quantum technology could help a uav handle complex detection tasks that current computers cannot solve quickly.
Deep learning models grow more advanced each year. These models help a uav learn from detection events and adapt to new situations. Some companies now use swarm intelligence. In this approach, many uav units work together to share detection results. This teamwork leads to better detection accuracy and faster responses.
Experts believe that future uav systems will use self-healing networks. These networks allow a uav to recover from failures and continue detection without stopping.
Expanding Applications
Information fusion machine vision systems will soon reach more industries. In disaster response, a uav can perform detection of survivors in dangerous areas. The system helps rescue teams find people faster. In smart cities, a uav can monitor traffic and support detection of accidents or road hazards. This technology improves safety for everyone.
Farmers use a uav for crop detection and health monitoring. The system helps increase food production and reduce waste. In wildlife protection, a uav can track animals and support detection of illegal activities. Hospitals use a uav for patient detection and monitoring, making healthcare safer.
A uav with advanced detection can even help in space exploration. Scientists use a uav to scan planets and perform detection of new features. The future holds endless possibilities for a uav and detection technology.
- A uav can support detection in construction, mining, and logistics.
- The system helps companies save time and money by improving detection accuracy.
- New detection methods allow a uav to work in extreme environments.
The next generation of uav detection will change how people solve problems in every field.
A uav with information fusion machine vision changes detection forever. Each uav uses detection to see what people miss. The system helps a uav perform detection in fog, darkness, or crowds. Detection becomes faster and more accurate. A uav can use detection for human activity recognition. The system lets a uav track movement and improve detection in real time. Human activity recognition grows stronger with each detection event. A uav can use detection in healthcare, agriculture, and cities. The future may bring new ways for a uav to use detection. Will detection by a uav soon surpass human ability?
FAQ
What is the main advantage of information fusion in machine vision systems?
Information fusion allows the system to combine data from different sensors. This process improves detection accuracy and reliability. The system can see more details and make better decisions than systems using only one sensor.
How do these systems handle sensor conflicts?
The system uses advanced algorithms to detect and reduce conflicts between sensors. It evaluates the reliability of each sensor and adjusts the final decision. This approach helps maintain accurate detection even when sensors disagree.
Can information fusion machine vision systems work in bad weather?
Yes. These systems use data from multiple sensors, such as radar and LiDAR. They can see through fog, rain, or darkness. The system continues to detect objects and track movement when visibility is low.
Where are information fusion machine vision systems used today?
Industries use these systems in autonomous vehicles, healthcare, agriculture, and security. They help with tasks like traffic monitoring, disease detection, crop analysis, and surveillance.
Do these systems require a lot of computing power?
Most systems need powerful hardware, especially for deep learning tasks. Edge computing and optimized algorithms help reduce the load. Some applications use cloud processing to handle large amounts of data efficiently.
See Also
Unexpected Insights Into Pharmaceutical Machine Vision Technology
How Cameras Function Within Machine Vision Systems
Understanding Image Processing In Machine Vision Systems