Point cloud data forms the backbone of 3D perception in today’s machine vision landscape. Industries such as automotive, healthcare, and logistics harness point cloud technology for tasks like inspection, navigation, and automation. The global machine vision market reached $19.4 billion in 2023 and continues to rise, driven by AI-powered systems that improve quality and efficiency. For example, Singapore’s Virtual Twin project uses point cloud models for urban planning, while construction sites employ drone-based point cloud scans to monitor progress and reduce errors.
| Industry | Adoption Highlights | Growth Statistics / Market Size / Projections |
|---|---|---|
| Automotive | 3D vision for assembly, defect detection, robot navigation. | 12.3% growth in Germany, 4.9% in US; 5.02% growth in machine vision sector (2023) |
| Electronics & Semiconductors | Detailed inspection of wafers, improving yield and quality. | Semiconductor market grew 16% in 2024 to $611B; projected 12.5% growth to $687B in 2025 |
| Healthcare | Diagnostics, surgical automation, transparent packaging challenges. | Emerging adoption with advances overcoming transparency issues |
| Manufacturing & Logistics | Improved product quality, robotic navigation, and automation in logistics. | Logistics automation market $65.25B in 2023, projected $217.26B by 2033 (12.8% CAGR) |
A point cloud machine vision system uses millions of 3D points to help machines understand and interact with complex environments, supporting smarter automation and real-time decision-making.
Key Takeaways
- Point cloud data provides detailed 3D views that help machines measure, detect, and understand objects and environments accurately.
- Advanced devices like LiDAR and cameras capture point clouds, which require filtering and segmentation to clean and organize the data for analysis.
- AI and deep learning improve point cloud processing by enabling fast, accurate object detection and real-time decision-making in machine vision systems.
- Point cloud technology supports many industries, including manufacturing, robotics, autonomous vehicles, and AR/VR, by enhancing inspection, navigation, and automation.
- Handling large point cloud datasets poses challenges like data volume and quality, but cloud computing and automated tools help manage and improve these processes.
Point Cloud Basics
What Is a Point Cloud?
A point cloud is a collection of 3D points that represent the surface of a real-world scene. Each point in a 3d point cloud has three coordinates: x, y, and z. Some points also include color or surface information. Modern sensors, such as LiDAR and depth cameras, capture these points with high accuracy. This data forms the foundation for 3d point cloud modeling in fields like engineering, earth sciences, and autonomous driving. Point clouds provide a direct way to visualize and measure 3d objects and environments. They serve as a critical data source for smart city planning, scientific research, and transportation systems.
Unique Properties
Point cloud data stands out from other 3d data types because of its raw, unstructured nature. Unlike meshes or voxels, point clouds do not connect points with lines or surfaces. This makes them flexible and detailed, but also means they require extra processing to create structured models. The table below highlights the differences:
| 3D Data Type | Description | Key Properties | Advantages | Disadvantages |
|---|---|---|---|---|
| Point Clouds | Sets of discrete 3D points from scanners or depth cameras, with X, Y, Z coordinates and optional attributes like color or intensity. | Unstructured, unordered, no connectivity information, raw geometric data. | Simple and flexible; directly obtained from scanning devices; captures fine details; suitable for large-scale scenes. | Lack of connectivity; requires large storage; needs processing to interpret or convert into models. |
| Meshes | Collections of vertices, edges, and faces defining surfaces with explicit connectivity. | Structured surface representation with connectivity between points. | Compact; suitable for rendering and visualization; efficient surface property computation. | Loss of fine detail compared to point clouds; requires processing to generate from point clouds; difficulty with non-manifold surfaces. |
| Voxels | 3D equivalent of pixels, representing volumetric data in a regular grid of cubic elements. | Regular, structured grid representing volume. | Suitable for volumetric analysis and simulations; efficient spatial indexing. | High memory consumption; limited resolution; difficulty representing thin structures and fine details. |
Tip: Point clouds capture fine details and current conditions, making them ideal for digital twins and real-world simulations.
3D Point Cloud vs. 2D Data
A 3d point cloud contains much richer information than a 2D image. While 2D images show only height and width, point clouds add depth, giving a full 3d view of objects and spaces. This extra dimension allows for precise object detection, measurement, and classification. In fields like autonomous driving, 3d point cloud data helps systems recognize small or oddly shaped objects that 2D images might miss. Advanced methods, such as point-based and voxel-based techniques, make it possible to process this complex data efficiently. As a result, point clouds expand the range of applications far beyond what 2D images can achieve.
Point Cloud Generation
3D Scanners and Cameras
3d scanning uses advanced devices to capture the shape and size of real-world objects. A 3d laser scanner sends out thousands of laser pulses every second. These pulses bounce off surfaces and return to the scanner, which measures the distance to each point. This process creates a detailed 3d point cloud. There are several types of 3d laser scanner systems:
- Terrestrial 3d laser scanner: Used for high-accuracy 3d scanning of buildings or large objects.
- Mobile 3d laser scanner: Mounted on vehicles for faster 3d scanning of roads or landscapes.
- Specialized 3d laser scanner: Designed for objects, tunnels, or wide-area mapping.
Cameras also play a key role in 3d scanning. Stereo cameras and RGB-D cameras use depth sensing to collect 3d data. Automated scanning setups often combine these devices for efficient 3d point cloud generation in industrial settings.
LiDAR and Photogrammetry
LiDAR stands for Light Detection and Ranging. This 3d scanning method uses infrared laser pulses to measure distances. LiDAR can collect up to 100,000 points per second, making it ideal for large-scale 3d scanning projects. LiDAR works well in low light and can even scan through vegetation. Photogrammetry, on the other hand, uses cameras to take many pictures from different angles. Software then reconstructs a 3d model from these images. Drones often use photogrammetry for 3d scanning because they can carry cameras more easily than heavy LiDAR units.
| Feature | LiDAR Advantages | Photogrammetry Advantages |
|---|---|---|
| Accuracy | High, sub-centimeter detail | Good in open areas |
| Visual Detail | Limited color, mostly geometry | Rich color and texture |
| Cost | Higher, needs special equipment | Lower, uses standard cameras |
| Speed | Fast data collection | Slower, image-heavy processing |
| Lighting Needs | Works day or night | Needs good lighting |
Note: Automated scanning systems may combine LiDAR and photogrammetry to balance accuracy, speed, and visual detail.
Data Quality Factors
The quality of 3d point cloud data depends on several factors during 3d scanning. The stability and calibration of the 3d laser scanner affect measurement accuracy. Environmental conditions, such as lighting and weather, can change how well the scanner works. The surface color and texture also matter. Smooth, light-colored surfaces reflect laser pulses better, while dark or rough surfaces can cause noise in the 3d point cloud. The placement and movement of the scanner during 3d scanning play a big role in data quality. Automated scanning systems use advanced software to filter noise and align points, improving the final 3d model.
| Factor Category | Effects on 3d Scanning Quality |
|---|---|
| Scanner Mechanism | Calibration, stability, and alignment impact 3d scanning accuracy |
| Environment | Lighting, weather, and reflectivity affect 3d scanning performance |
| Surface Properties | Color, texture, and material influence 3d scanning results |
| Scanner Placement | Position and movement affect 3d point cloud precision |
High-quality 3d scanning ensures accurate 3d models for inspection, measurement, and automation.
Point Cloud Processing
Filtering and Segmentation
Point cloud processing begins with filtering and segmentation. These point cloud processing methods help clean and organize raw data. Filtering removes unwanted points based on height or intensity. This step eliminates noise and irrelevant points, making the data more accurate. Segmentation classifies each point into categories like objects or surfaces. Teams can then isolate features for detailed analysis. Segmenting point clouds into layers such as terrain, infrastructure, or vegetation reduces complexity and speeds up point cloud processing. These steps improve data usability and prepare it for tasks like inspection and measurement.
- Filtering removes noise and irrelevant points.
- Segmentation classifies points for easier analysis.
- Layering reduces complexity and supports faster processing.
Deep Learning Methods
Deep learning has transformed point cloud processing. Teams use deep learning models to classify and detect objects in point clouds. For example, ArcGIS Pro uses a workflow that prepares training data, trains a model, and applies it to new data. This process requires powerful GPUs and specialized libraries. Deep learning methods convert point clouds into structured formats like voxels or pillars. Networks such as VoxelNet and PointPillars learn features from these formats and predict object locations. Teams prepare labeled datasets, train networks, and evaluate results. These point cloud processing methods support inspection and automation by enabling accurate object detection and classification.
- Deep learning models classify and detect objects.
- Structured formats like voxels and pillars improve learning.
- Training and evaluation ensure high accuracy.
Software Tools
Many software tools and point cloud library options support point cloud processing. AWS Thinkbox Sequoia handles cross-platform point cloud and mesh processing. TopoDOT focuses on geospatial data and AI-accelerated feature extraction. Supervisely and CVAT offer 3D annotation and team collaboration. Kognic supports data curation and customizable workflows. Popular point cloud library choices include Open3D, PCL, PyTorch3D, and CloudCompare. These tools provide visualization, filtering, segmentation, and mesh generation. Teams select tools based on needs like annotation, automation, and large-scale data handling.
| Library/Software | Platform/Language | Key Features |
|---|---|---|
| Open3D | Python | Visualization, geometry processing |
| PCL | C++ | Filtering, segmentation, surface reconstruction |
| PyTorch3D | Python | Deep learning integration |
| CloudCompare | Desktop | Visualization, processing without coding |
Point cloud processing enables inspection, measurement, and automation in industries. For example, teams use point cloud processing to inspect assembly quality by comparing scanned data to CAD models. This approach supports fast, accurate inspection and integrates into automated workflows.
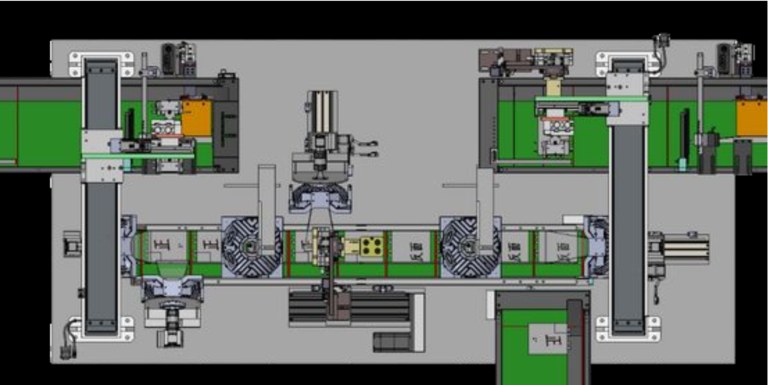
Point Cloud Machine Vision System
System Types
A point cloud machine vision system comes in several main types, each designed for specific 3d applications. The most common systems include laser scanner-based and photogrammetry-based solutions. Laser scanner-based 3d vision systems use LiDAR sensors to send out rapid laser pulses. These sensors capture highly accurate 3d measurements and often combine with RGB cameras and inertial measurement units (IMUs) to improve data quality. Terrestrial laser scanners (TLS) perform high-precision static scans, making them ideal for building documentation and factory mapping. Mobile laser scanners move through environments, collecting fast and accurate 3d point cloud data for large-scale 3d mapping.
Photogrammetry-based 3d vision systems use cameras to capture images from multiple viewpoints. Specialized software reconstructs 3d spaces from these images. Drones often carry these cameras, allowing for lightweight and flexible 3d mapping in construction, agriculture, and surveying. Laser scanners usually provide higher accuracy and denser point clouds than photogrammetry, but photogrammetry offers rich color and texture details.
Note: The choice between laser scanner and photogrammetry systems depends on the required accuracy, mobility, and application context.
| System Type | Data Acquisition Method | Accuracy | Point Cloud Density | Mobility | Typical Applications |
|---|---|---|---|---|---|
| Laser Scanner-Based | LiDAR, laser pulses | Very High | Dense | Static/Mobile | Building scans, factory mapping |
| Photogrammetry-Based | Multi-view cameras | Moderate-High | Moderate | Highly Mobile | Drone surveys, agriculture |
3d computer vision relies on these system types to generate reliable 3d point cloud data for further analysis, mapping, and automation.
Integration with AI
Modern point cloud machine vision systems use artificial intelligence to unlock new capabilities in 3d computer vision. AI models, such as deep learning networks, process complex 3d point cloud data to extract, classify, and detect objects. GeoAI, a specialized branch, combines spatial data with AI to solve mapping and 3d analysis problems. These AI-driven systems support pixel classification, image segmentation, and feature extraction, making them essential for autonomous driving, smart cities, and augmented reality.
Deep learning models like PointNet handle the irregular and complex structure of 3d point cloud data. These models compress, analyze, and interpret the data, enabling accurate object recognition and scene understanding. AI integration improves the speed and accuracy of point cloud processing, allowing 3d vision systems to operate in real-time. This real-time capability is critical for applications such as robotics, where systems must react instantly to changes in the environment.
Tip: AI-powered 3d machine vision systems can detect obstacles, measure distances, and map environments in real-time, supporting safer and more efficient automation.
3D Reconstruction Machine Vision System
A 3d reconstruction machine vision system transforms raw point cloud data into detailed 3d models. This process involves several technical steps and requirements:
- Densify the point cloud. The system starts with a sparse point cloud, often generated by Structure from Motion (SfM). It uses depth map computation and fusion to create a dense point cloud, capturing fine details of the scene.
- Mesh reconstruction. The dense point cloud converts into a tetrahedral mesh using Delaunay triangulation. Graph-cut optimization classifies each part as inside or outside the object. The system then extracts the mesh surface with the marching cubes algorithm.
- Mesh refinement. The mesh undergoes simplification, smoothing, and denoising. Techniques like Laplacian filtering and normal voting tensor filtering improve mesh quality. Optimization methods such as vertex relaxation and edge flipping further enhance the model.
- Texture mapping. The system maps images onto the 3d mesh, adding realistic color and surface details. This step creates visually rich models for virtual reality, digital twins, and visualization.
A 3d reconstruction machine vision system requires advanced hardware and software. Multiple cameras, LiDAR sensors, and powerful GPUs support data acquisition and processing. Software components handle camera calibration, feature extraction, image matching, and depth estimation. The system follows a clear workflow: data acquisition, point cloud generation, meshing, texturing, and analysis. AI integration boosts feature extraction and object recognition, improving accuracy and enabling automation.
3d computer vision systems achieve real-time analysis by converting 3d point clouds into range image representations. This approach transforms unordered 3d data into compact 2d matrices, allowing convolutional neural networks to process information quickly. Encoder-decoder architectures with spatio-temporal convolution blocks capture dynamic changes in the environment. On benchmarks like KITTI and NuScenes, advanced models achieve inference times under 20 milliseconds per frame. These results show that real-time 3d reconstruction machine vision systems can support demanding applications such as autonomous vehicles and robotics.
3d reconstruction machine vision systems play a central role in 3d mapping, inspection, and automation. They enable cloud-based 3d vision systems to deliver scalable, real-time solutions for industries ranging from manufacturing to smart cities. As 3d computer vision technology advances, these systems will continue to drive innovation in mapping, modeling, and real-time analysis.
Applications and Benefits

Manufacturing and Inspection
Manufacturers rely on 3d scanning and 3d computer vision to improve inspection and quality control. Point cloud data supports surface analysis for detecting defects and measuring areas, volumes, and curvatures. Teams use classification and object recognition to automate feature identification, which increases inspection efficiency. 3d modeling and color mapping allow for detailed visualization and design verification. AI-driven classification and object detection automate inspection processes, boosting accuracy and throughput. Measurement tools calculate distance, area, and elevation, supporting precise manufacturing assessments. Integration with robots and optical 3d measurement technologies enables real-time monitoring and automated compliance in smart factory environments. These advances reduce scrap, enable early problem detection, and support 3d inspection workflows.
- Surface analysis for defect detection
- Automated feature recognition
- 3d modeling for design verification
- Real-time monitoring with robots
Robotics and Automation
Industrial automation benefits from 3d scanning and 3d computer vision by enabling robots to interpret sensory inputs and adapt to changing environments. High-quality annotations of point cloud data help robots recognize and manipulate objects with precision. This reduces errors in gripping or part placement and increases throughput. Machine learning models trained on annotated data improve robot perception and decision-making. Production lines become smoother, productivity rises, and safety improves. In agriculture, 3d scanning datasets support robotic navigation, precision irrigation, and yield prediction. These applications demonstrate how 3d computer vision and 3d scanning drive efficiency and reliability in industrial automation.
| Application Area | Impact on Robotics and Automation |
|---|---|
| Robotic Navigation | Accurate 3d mapping and obstacle avoidance |
| Precision Agriculture | Real-time field analysis and crop management |
| Industrial Robotics | Improved object recognition and manipulation |
Autonomous Vehicles
Autonomous vehicles depend on 3d scanning and 3d computer vision for perception and navigation. LiDAR sensors generate dense 3d point clouds, providing real-time spatial representations of the environment. AI models use cuboid annotations to detect, classify, and track objects such as vehicles and pedestrians. Tracking objects frame-by-frame supports collision avoidance and smooth navigation. Aggregated annotations help create high-definition maps for precise localization and route planning. Sensor calibration, noise reduction, and sensor fusion with cameras improve annotation quality. These steps form the foundation for training, simulation, and benchmarking in autonomous driving computer vision applications.
- Real-time 3d mapping for navigation
- Object detection and tracking
- High-definition map creation
Note: Annotated 3d point clouds enhance safety and reliability in autonomous vehicle systems.
AR/VR and Digital Twins
3d scanning and reconstruction provide the foundation for digital twins and immersive AR/VR experiences. Point cloud data, captured by LiDAR or laser scanning, delivers highly accurate 3d spatial information. Digital twins act as dynamic virtual replicas of physical assets, integrating real-time data for monitoring and simulation. In AR/VR, 3d models from point cloud data enable virtual walkthroughs, remote inspections, and interactive training. Integration with BIM and GIS supports comprehensive digital twin development. Laser scanning ensures rapid and precise data collection, essential for up-to-date digital twins. Real-time updates allow industries to monitor structural changes, detect anomalies, and improve operational efficiency.
- Accurate 3d scanning for digital twin creation
- Real-time monitoring and simulation
- Immersive AR/VR training and walkthroughs
- Integration with BIM and GIS for advanced mapping
Challenges and Trends
Data Volume and Complexity
Point cloud data from 3d scanning often reaches massive sizes. A dynamic human point cloud sequence at 30 frames per second can generate nearly 1.9 GB of uncompressed data in just 10 seconds. Scanning devices in large projects may produce billions of points, resulting in gigabytes or even terabytes of information. This volume creates challenges for real-time processing, streaming, and rendering. The irregular and sparse nature of point clouds, along with noise and incomplete data, requires specialized compression algorithms. Teams must also address interoperability issues, as different formats complicate data sharing and workflow integration. Real-time visualization and analysis of billions of points demand advanced graphics processing and optimized software. Collaboration becomes difficult when large data sizes and network limitations slow down sharing. The complexity of cleaning, filtering, and aligning 3d scanning data means that skilled professionals and powerful computers are essential for efficient 3d model creation.
Accuracy and Quality
Ensuring high accuracy and quality in 3d scanning and inspection remains a top priority. Environmental factors, equipment limitations, and human error can affect data quality. Modern solutions use cloud computing for scalable storage and processing, making it easier to handle large, complex datasets without losing detail. Automated quality control systems employ ground control targets and detection algorithms to measure and correct positional errors. Software tools like Autodesk ReCap Pro and CloudCompare offer remote filtering, alignment, and modeling. Teams assess accuracy by comparing lidar data to known checkpoints and use automated algorithms to identify and correct errors. Principal Component Analysis helps measure noise and repeatability, supporting rapid quality assessment. These methods improve reliability and reduce manual intervention in 3d scanning and inspection workflows.
| Solution Type | Benefit |
|---|---|
| Cloud Computing | Scalable, secure processing and storage |
| Automated QC | Reduces manual labor and user error |
| Software Tools | Remote, collaborative modeling and simulation |
Future of 3D Point Cloud
Emerging trends in 3d point cloud technology will shape the future of machine vision. AI and machine learning now enhance pattern recognition and real-time decision-making in 3d scanning and inspection. Advanced 3d imaging provides detailed volumetric data, improving depth perception for industries like electronics and automotive. Edge computing enables local, real-time processing, reducing latency and boosting security. Collaborative robots equipped with advanced vision systems can perform precise inspection tasks alongside humans, increasing productivity and safety. The global market for point cloud-based machine vision systems is projected to grow rapidly, driven by automation, robotics, and AI integration. As 3d scanning technology advances, industries will see more intelligent, accurate, and efficient inspection systems.
Point cloud data empowers modern machine vision by providing rich 3D representations with attributes like color and intensity. Teams use advanced processing pipelines and visualization tools to achieve accurate, efficient 3D reconstructions for applications in AR/VR, medical imaging, and robotics.
Future trends include cloud and edge computing, new imaging modalities, and quantum computing, which will drive further innovation.
- Professionals should focus on scalable data management and automation tools.
- Resources such as Papers With Code and SoftServe offer updates on the latest methods and industry insights.
Staying informed ensures readiness for rapid changes in this evolving field.
FAQ
What is the main advantage of using point cloud data in machine vision?
Point cloud data gives machines a true 3D view of objects and spaces. This allows for precise measurement, object detection, and automation in many industries.
How do LiDAR and photogrammetry differ in point cloud generation?
LiDAR uses laser pulses to capture geometry with high accuracy. Photogrammetry uses photos from different angles to build 3D models. LiDAR works better in low light, while photogrammetry provides richer color detail.
Can point cloud data improve quality control in manufacturing?
Yes. Point cloud data helps detect defects, measure parts, and compare products to digital models. This leads to faster inspections and higher product quality.
What challenges do teams face when processing large point cloud datasets?
Large point clouds require powerful computers and advanced software. Teams often deal with noise, incomplete data, and slow processing speeds. Efficient storage and real-time analysis remain ongoing challenges.
Is point cloud technology suitable for real-time applications?
Modern systems use AI and edge computing to process point clouds quickly. This makes real-time applications possible in robotics, autonomous vehicles, and smart factories.
See Also
Understanding Pixel-Based Machine Vision In Contemporary Uses
Essential Insights Into Computer And Machine Vision Technologies
Investigating The Use Of Synthetic Data Within Vision Systems
Image Recognition’s Impact On Quality Control In Machine Vision